
Science Robotics dergisinde yayımlanan yeni bir araştırma, felç geçiren hastaların yürüme rehabilitasyonunda “TEPI” (Terapist-Dış İskelet-Hasta Etkileşimi) adını verdikleri yeni bir yöntemi tanıttı. Bu sistemde, terapist ve hasta giydikleri dış iskeletler aracılığıyla birbirlerine sanal yaylar ve sönümleyicilerle bağlanarak insan sezgisi ile robotik hassasiyeti gerçek zamanlı olarak bir araya getiriyor.
Emek Barış Küçüktabak
Röportaj: Binali Furkan Alper
GazeteBilim Yazı İşleri
Geleneksel terapinin ve mevcut robotların sınırları
Felç sonrası bireyler, alt uzuvlarındaki zayıflık ve bağımsız eklem kontrolü kaybı nedeniyle sıklıkla hareketlilik sorunları yaşarlar. Bu nedenle yürümenin yeniden kazanılması genellikle fizyoterapistler tarafından yürütülen yüksek yoğunluklu eğitimlerle sağlanan birincil rehabilitasyon hedefidir. Ancak, terapistin manuel yardımı veya direncini içeren geleneksel yaklaşımlar, terapist için fiziksel olarak son derece yorucudur ve aynı anda birden fazla ekleme müdahale edilmesini sınırlar.
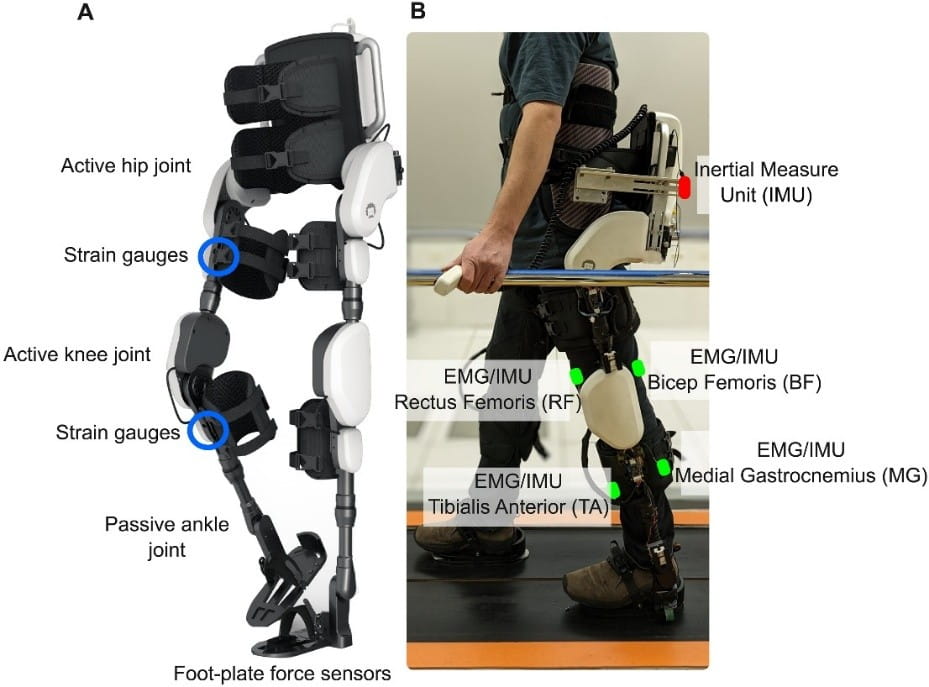
Robotik dış iskeletler, birden fazla ekleme destek sağlayarak, terapistin yükünü hafifleterek ve objektif performans geri bildirimi sunarak umut verici bir çözüm olarak ortaya çıkmıştır. Ne var ki, tipik dış iskelet kontrol stratejileri çoğunlukla önceden belirlenmiş yörüngeleri takip eder ve fizyoterapistin tedaviye anlık katılımını sınırlar. Bu durum, dış iskeletin hastanın anlık ihtiyaçlarına uyum sağlama yeteneğini kısıtlayarak klinik sonuçları olumsuz etkileyebilmektedir.
TEPI: İnsan ve robot işbirliği
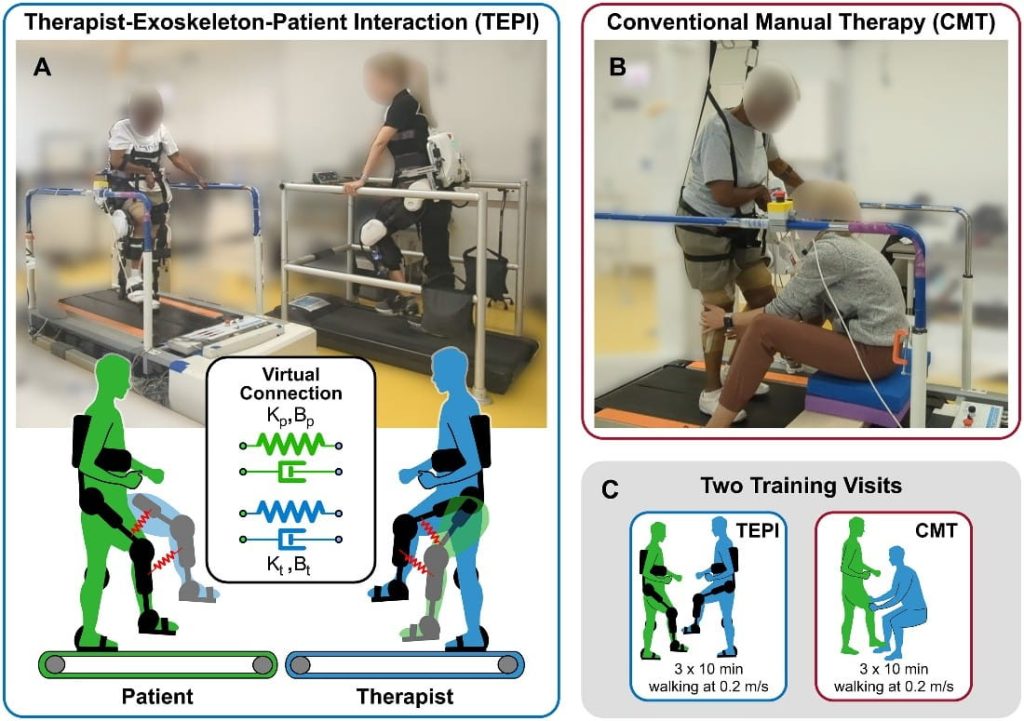
Emek Barış Küçüktabak ve meslektaşları tarafından geliştirilen TEPI (Therapist-Exoskeleton-Patient Interaction / Terapist-Dış İskelet-Hasta Etkileşimi) konsepti, fiziksel insan-robot-insan etkileşimine dayanıyor.
Makalenin yazarı Küçüktabak, GazeteBilim’e yaptığı özel açıklamalarda sistemin ortaya çıkış fikrini ve mevcut eksiklikleri şu sözlerle ifade etti: “TEPI fikri, geleneksel yürüyüş rehabilitasyonunda terapistin fiziksel olarak aynı anda sınırlı sayıda noktaya müdahale edebilmesinden yola çıktı. Bazı durumlarda bir hastaya birden fazla terapistin destek vermesi gerekiyor; tek terapist olduğunda ise terapist temas noktalarını değiştirerek hastayı yönlendiriyor, ancak kalça ve diz gibi birden fazla ekleme aynı anda etkili şekilde müdahale etmek zorlaşıyor.” ve şöyle ekledi “Öte yandan yalnızca dış iskelet kullanılan yaklaşımlarda robot hastaya destek sağlayabiliyor, fakat terapistin klinik deneyimi, sezgisi ve anlık değerlendirmesi sistemin kontrolüne yeterince dahil edilemiyor. Biz bu iki yaklaşımı birleştirmeyi hedefledik. TEPI ile robotun hassasiyetini, yüksek kuvvet uygulama kapasitesini ve çok noktalı destek verebilme özelliğini terapistin bilgisi ve deneyimiyle bir araya getiren yeni bir rehabilitasyon yöntemi tasarladık.”
Bu yeni paradigmada hem fizyoterapist hem de felçli hasta, kalça ve dizlerden sanal yay-sönümleyici elemanlarla birbirine bağlanan alt ekstremite dış iskeletleri giyiyor.
Bu çift yönlü sanal bağlantı sayesinde, terapist hastanın hareketlerini yönlendirirken aynı zamanda gerçek zamanlı dokunsal geri bildirim alabiliyor. Bir başka deyişle, terapist sanal da olsa hastanın bacağındaki direnci veya zayıflığı kendi vücudunda hissedebiliyor ve buna göre kalça ve dizlere aynı anda senkronize bir şekilde müdahale edebiliyor.
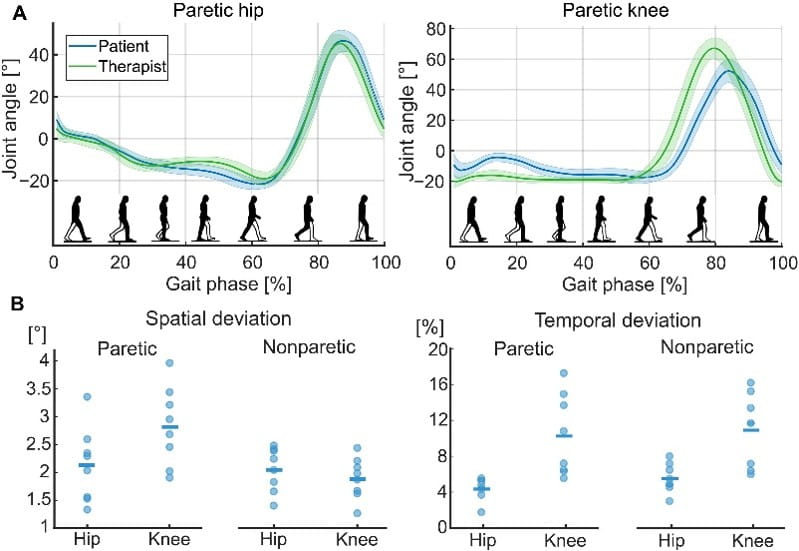
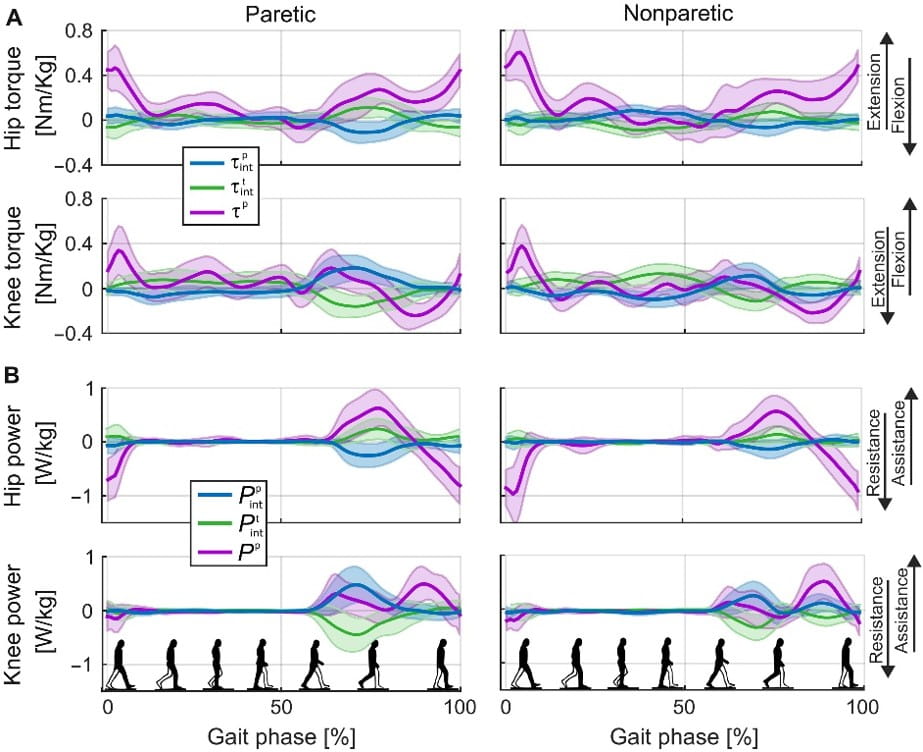
Araştırma ekibi, bu yeni yaklaşımı kronik felçli sekiz hasta üzerinde, geleneksel manuel terapist destekli yürüme bandı eğitimi ile karşılaştırmalı olarak test etti. Deney sonuçları umut verici bulgular ortaya koyan TEPI, geleneksel terapiye kıyasla hastaların çok daha geniş bir eklem hareket açıklığına ulaşmasını sağladı.Hastaların adım uzunlukları ve adım yükseklikleri, geleneksel manuel terapiye oranla belirgin bir artış gösterdi.Sistemin robotik destek sağlamasına rağmen, ölçümler hastaların geleneksel terapiye benzer seviyelerde kas aktivasyonu gösterdiğini, yani hastaların tembelleşmek yerine aktif olarak çaba sarf ettiğini kanıtladı. Hastaların robotik sistem içerisinde pasif kalması yerine nasıl aktif tutulduğu konusunda Küçüktabak, GazeteBilim’e şu açıklamaları yaptı: “TEPI sisteminde terapist hastanın hareketini yalnızca görsel olarak takip etmiyor, aynı zamanda kendi dış iskeleti üzerinden hastanın hareketlerini fiziksel olarak da hissedebiliyor. Bu sayede terapist ne zaman, ne kadar ve hangi ekleme destek vermesi gerektiğini daha sezgisel biçimde ayarlayabiliyor. Destek tamamen pasif bir hareket oluşturmak yerine, hastanın kendi çabasını sürdüreceği seviyede veriliyor.”
Ve şu şekilde ekledi: “Bu yaklaşım hastanın hareketi robota bırakmasını değil, terapistin yönlendirmesine aktif olarak katılmasını teşvik ediyor. Ayrıca terapist hastayı görsel ve sözlü olarak da motive edebiliyor. İyileşme sürecinde daha ileri seviyedeki hastalar için sistem yalnızca destekleyici değil, gerektiğinde direnç uygulayan ve hastayı daha fazla zorlayan bir rehabilitasyon aracı olarak da kullanılabilir.”
Hastalar, anket sonuçlarına göre süreci son derece eğlenceli ve değerli bulduklarını, motivasyonlarının yüksek olduğunu da bildirdi. Bu süreçle ilgili Barış Emre Küçüktabak şöyle aktardı: “Rehabilitasyonda tedavinin sürdürülebilirliği en az yöntemin teknik başarısı kadar önemlidir. Hastaların tedaviyi faydalı, anlaşılır ve motive edici bulması, seanslara daha istekli katılmalarını ve egzersizleri daha düzenli sürdürmelerini sağlayabilir.
TEPI’de hasta yalnızca bir cihazla değil, terapistiyle birlikte hareket ediyor. Bu sosyal etkileşim, hastanın kendini sürecin aktif bir parçası olarak hissetmesine yardımcı olabilir. Motivasyonun ve dikkatin yüksek olması, motor öğrenme ve beynin yeni hareket stratejileri geliştirmesi açısından önemli bir ortam yaratır.”
Bu entegrasyon, felç tedavisi gören hastaların yürüme rehabilitasyonu sonuçlarını iyileştirmek için sağlam, heyecan verici ve kişiselleştirilebilir bir çerçeve sunuyor. Ancak bu teknolojiyi standart rehabilitasyon merkezlerinde günlük bir rutinin parçası olarak görebilmek için aşılması gereken bazı engeller bulunuyor. Küçüktabak, donanım maliyetleri ve kurulum zorlukları hakkında GazeteBilim’e şu değerlendirmelerde bulundu: “İlk önemli adımlardan biri donanım maliyetlerinin düşmesi olacaktır. Bugün iki dış iskeletli bir sistem birçok klinik için yüksek maliyetli görünebilir; ancak aktüatör, sensör ve robotik donanım teknolojilerindeki hızlı gelişmelerle bu maliyetlerin zamanla daha makul seviyelere gelmesi beklenebilir.
“Bunun yanında sistemin daha kolay kurulabilir, daha güvenilir ve terapistler için daha pratik kullanılabilir hale gelmesi gerekiyor. Klinik kullanımda cihazın hastaya hızlıca takılıp çıkarılması, terapistin sistemi kolayca ayarlayabilmesi ve güvenlik mekanizmalarının güçlü olması çok önemli. Ayrıca sağlık sigortalarının bu tür robotik rehabilitasyon yöntemlerini ödeme kapsamına alması da yaygınlaşma için kritik adımlardan biri olacaktır.”
Araştırmacı sözlerini tamamlarken, “Umarım bu çalışmamız, hem robotik rehabilitasyon alanında yeni çalışmalara hem de gelecekte daha etkili tedavi yöntemlerinin geliştirilmesine vesile olur.” diyerek bu yenilikçi teknolojinin potansiyeline vurgu yaptı.
Kaynakça:
Emek Barış Küçüktabak et al.,Therapist-exoskeleton-patient interaction for gait therapy.Sci. Robot.11,eadz9628(2026). DOI:10.1126/scirobotics.adz9628




